Pose Frame Semantics Proposal
The latest pose frame semantics 1.7 documentation can be found at Pose Frame Semantics Tutorial
- Authors:
Steven Peters
<scpeters@osrfoundation.org>, Addisu Taddese<addisu@openrobotics.org>, Eric Cousineau<eric.cousineau@tri.global> - Status: Final
- SDFormat Version: 1.7
libsdformatVersion: 9.0
All sections affected by amendments are explicitly denoted as being added or modified.
These are added as amendments given that the current proposal has not yet been migrated to the specification documentation.
Amendment 1: Directly Nested Models
- Status: Draft
- SDFormat Version: 1.7
libsdformatVersion: 9.3
Amendment 2: Composition Update
- Status: Draft
- SDFormat Version: 1.8
libsdformatVersion: 11
For more background, please see:
- PR overview for sdformat#316.
- Ian Chen's comment: sdformat#316 (comment)
Introduction
This proposal suggests a series of changes intended to support semantics for
more expressivity of kinematics and coordinate frames in SDFormat 1.7.
SDFormat 1.5 added <frame> elements to several elements, and the frame
attribute string to <pose> elements, as described in the
documentation on existing behavior for pose frame semantics.
Semantics for the frame element and attribute were not fully defined, so they
have not yet been used.
The changes proposed here are intended to fully define the frame element to
improve usability.
An initial version of this proposal without support for nested models was
implemented in libsdformat 9.0, while implementation of Amendment 1 is targeted
for libsdformat 9.3.
Document summary
The proposal includes the following sections:
- Motivation: An explanation of the background and rationale behind the proposal
- Proposed changes: Each addition to or subtraction from the existing SDFormat version’s design, definitions, semantics and syntax, organized under subsections of related concepts
- Examples: Long form code samples of the proposed changes
- Parsing phases: Updated phases of parsing kinematics necessary for SDFormat 1.7 models and worlds
Syntax
The proposal uses XPath syntax
to describe elements and attributes concisely.
For example, <model> tags are referred to as //model using XPath.
XPath is even more concise for referring to nested tags and attributes.
In the following example, <link> elements inside <model> tags are
referenced as //model/link and model name attributes as //model/@name:
<model name="model_name">
<link/>
</model>
Motivation
Coordinate frames are a fundamental aspect of model specification in SDFormat.
For each element with a //pose tag
(such as model, link and joint), a coordinate frame is defined, consisting of
an origin and orientation of XYZ coordinate axes.
Coordinate frames are defined by applying the pose transform relative to
another coordinate frame.
In SDF 1.6 and earlier, there are fixed rules for determining the frame
relative to which each subsequent frame is defined
(see the "Parent frames" sections in the documentation for
Pose frame semantics: legacy behavior).
This proposes to improve the expressivity of model specification in SDFormat by adding the ability to define arbitrary coordinate frames within a model and choose the frame relative to which each frame is defined.
This allows frames to be used to compose information and minimize redundancy, such as specifying a link's pose relative to its parent / inboard joint. It could also be used to abstract other information for inverse kinematics, visual servoing, or sensor calibration by defining a camera pose using a frame instead of a base link and pose offset.
Proposed changes
The following sections are the proposed changes regarding the semantics of SDFormat 1.7’s frame element and supporting topics. Top level sections may encompass subsections of proposed changes that fall under the same purview. Each section or subsection describes a proposed change, the details surrounding it, how it differs from existing functionality, and why the change is necessary. Some sections include examples and alternatives considered.
1 Terminology
1.1 Frames and poses
Each pose must be defined relative to (or be measured in) a certain frame.
This is achieved by the attribute //pose/@relative_to, described below.
Arbitrary frames are defined with the //frame tag.
A frame must have a name (//frame/@name),
be attached to another frame or link (//frame/@attached_to),
and have a defined pose (//frame/pose).
Further details of the change include:
- A pose defined relative to a given frame does not imply it is attached to that frame.
- A pose's relative to frame only defines its initial configuration;
any movement due to degrees of freedom will only result in a new pose as
defined by its attached to frame.
- This is done in order to support a "Model-Absolute" paradigm for model building; see the Addendum on Model Building for further discussion.
Defining these semantics, which were missing from SDFormat 1.5, minimizes redundancy in poses and offsets and makes relationships between physical elements easier to interpret.
1.2 Explicit vs. implicit frames
Explicit frame elements (//frame) must only appear in //model
(//model/frame) and //world (//world/frame) elements.
Implicit frames, defined by non-frame elements, must be introduced for convenience.
The following frame types are implicitly introduced:
- Link frames: each link has a frame named
//link/@nameattached to the link at its origin defined by//link/pose. - Joint frames: each joint has a frame named
//joint/@nameattached to the child link at the joint's origin defined by//joint/pose. As a direct consequence,worldis no longer permitted to be specified as a child link of a joint, since that would break encapsulation of the model. - Model frame: each model has a frame that is attached to one of its links
(see section 2.1
for the definition of a model's canonical link).
Depending on the context, a model frame can be referenced with
__model__or//model/@name(see section 2.2). The model frame is the default frame to which explicit model frames defined by//model/frameare attached. - World frame: each world has a fixed inertial reference frame named
worldthat is the default frame to which explicit world frames defined by//world/frameare attached.
SDFormat 1.5 permitted explicit //frame elements in many places.
SDFormat 1.7 limits //frame elements to //model and //world since
this provides equivalent functionality with much less complexity required in
the SDFormat parser.
1.2.1 Alternatives considered
Introducing implicit frames for other elements such as //link/visual,
//link/collision, and //link/sensor was considered. However, it was
determined that introducing these implicit frames adds unnecessary complexity
to the SDFormat parser. It would also pollute the frame graph making it less
efficient to traverse.
1.3 Empty //pose and //frame elements imply identity pose
Empty //pose elements must be interpreted as equivalent to the identity pose.
In the following examples, the //pose elements in each pair are equivalent to each other.
<pose />
<pose>0 0 0 0 0 0</pose>
<pose relative_to='frame_name' />
<pose relative_to='frame_name'>0 0 0 0 0 0</pose>
Likewise, empty //frame elements must be interpreted as having an identity
pose relative to //frame/@attached_to.
The four frame elements below are equivalent.
<frame name="F" attached_to="A" />
<frame name="F" attached_to="A">
<pose />
</frame>
<frame name="F" attached_to="A">
<pose relative_to="A" />
</frame>
<frame name="F" attached_to="A">
<pose relative_to="A">0 0 0 0 0 0</pose>
</frame>
In SDFormat 1.5, an identity pose is specified by omitting the tag or with an
explicit <pose>0 0 0 0 0 0</pose>.
This change is a convenience to reduce verbosity, because there are many
expected cases where a frame is defined relative to another frame with no
additional pose offset.
2 Model frame and canonical link
2.1 Implicit frame defined by //model/pose attached to canonical link
Each non-static model must have at least one link designated as the canonical link. The implicit frame of the model is attached to this link. This implicit frame of a static model is attached to the world.
The implicit frame is defined by the //model/pose element, typically
called the "model frame".
It must be user-configurable, but with a default value.
The name of the canonical link can be specified in the //model/@canonical_link attribute.
If it is not specified, then the first //link element in the model is chosen as the canonical link.
The following two models are equivalent:
<!-- //model/@canonical_link -->
<model name="test_model" canonical_link="link1">
<link name="link1"/>
<link name="link2"/>
</model>
<model name="test_model">
<link name="link1"/>
<link name="link2"/>
</model>
In SDFormat 1.4, the model frame is the frame relative to which all
//link/pose elements are interpreted.
The SDFormat 1.4 specification does not clearly state to which link the model
frame is attached, but Gazebo has a convention of choosing the first //link
element listed as a child of a //model as the @attached_to link and
referring to this as the model's Canonical Link
(see Model.cc from gazebo 10.1.0).
In SDFormat 1.5, a model without links is considered valid, but its implicit frame is not well-defined since it is not clear where the frame is attached. It is necessary to specify what a canonical link is because the model frame must be attached to this link.
2.1.1 Alternatives considered
<!-- //link/@canonical -->
<model name="test_model">
<link name="link1" canonical="true"/>
</model>
<!-- //model/canonical_link -->
<model name="test_model">
<canonical_link>link1</canonical_link>
</model>
2.2 Referencing the implicit model frame via __model__ or model name
SDFormat 1.7 must provide a means to reference the implicit model frame depending on the context.
From child elements of a given model, the "internal implicit model frame" can
be referenced using the reserved name __model__.
From outside of a given model, the "external implicit model frame" can be
referenced using the model's specified name.
Per Amendment 1, inlibsdformat 9.3 nested models have an "external implicit model frame"
that can be referenced by sibling frames, but the contents of a nested model
can only be referenced from within the nested model.
Previous versions of SDFormat did not have the @attached_to and @relative_to
attributes, so there was no way to refer to frames by name.
The ability to reference __model__ makes implementation more straightforward.
2.2.1 Alternatives considered
The first alternative was to make the model frame be explicitly named as the
model name specified by the file (not overridden by //include). No link,
joint, or frame can be specified using this name.
The caveat with this is that it be confusing if/when more complex references are supported via nesting.
The second alternative was to prevent the implicit model frame from being referred to explicitly.
For this solution, implementation could become complicated / ambiguous when
handling default frames. For example, "" could be used as the token for the
model / world frame. Additionally, @relative_to defaults to "", but in some
contexts this may imply the model frame, the parent element frame, the child link frame, etc.
It also complicates migration via Converter.cc when handling things like
replacing //joint/axis/use_parent_frame with
//joint/axis/xyz/@expressed_in.
2.3 Referencing the implicit world frame via world
The "internal implicit frame" for a //world element must be world (rather
than __model__ or __world__). This may not be referred to within //model
elements, except for specifying //joint/parent.
For the same reasons as the implicit model frame, the ability to reference
world makes implementation more straightforward.
2.3.1 Alternatives considered
Two possible alternatives were (a) have both __world__ for the world frame and
world for the world link or (b) use __world__ for both.
(a) was decided against because it seemed redundant given that world could be
referenced both as a frame and a link, which is consistent with implicit frames
for links. (b) was decided against because it would create additional churn to
support both world and __world__ up to a point, and then switch over to
__world__.
3 Name conflicts and scoping rules for explicit and implicit frames
As frames are referenced in several attributes by name, it is necessary to
avoid naming conflicts between frames defined in //world/frame,
//world/model, //model/frame, //model/model, //model/link, and //model/joint.
This motivates the scoping and naming rules proposed in the following sections.
3.1 Scoping rules for referencing frames by name
To ensure that multiple copies of the same model can co-exist as siblings in a world, separate scopes must be defined for referencing frames by name:
- Model scope: each model has its own scope in which explicit
//model/frameand implicit//model/model,//model/linkand//model/jointframes can be referenced. - World scope: the world has a separate scope in which explicit
//world/frameand implicit//world/modelframes can be referenced.
For example, the following world has four scopes, one each for the world,
model_1,model_2, and model_3.
The world scope contains the explicit //world/frame named explicit_frame
and the implicit model frames model_1 and model_2.
The model_1 and model_2 scopes each contain frames named explicit_frame
and link, but there is no name conflict because they are in separate scopes.
<world name="frame_scope">
<frame name="explicit_frame"/>
<model name="model_1">
<frame name="explicit_frame"/>
<link name="link"/>
</model>
<model name="model_2">
<frame name="explicit_frame"/> <!-- VALID: name is unique in this model. -->
<link name="link"/> <!-- VALID: name is unique in this model. -->
<model name="model_3">
<frame name="explicit_frame"/> <!-- VALID: name is unique in this model. -->
<link name="link"/> <!-- VALID: name is unique in this model. -->
</model>
</model>
</world>
In the following example, there are three frames in the model scope:
the implicit link frames base and attachment and the implicit
joint frame attachment.
Referring to a frame named attachment is ambiguous in this case,
which inspires the element naming rule in the following section
that disallows name conflicts like this.
<model name="model">
<link name="base"/>
<link name="attachment"/>
<joint name="attachment" type="fixed"> <!-- INVALID: joint name should not match name of sibling link. -->
<parent>base</parent>
<child>attachment</child>
</joint>
</model>
In SDFormat 1.4, the only objects referenced by name are the links
named in //joint/parent and //joint/child, and the names are always
scoped to the current model.
In SDFormat 1.5, the :: delimiter is used to indicate that the target
link is within a nested model, but the scope is still limited to
objects contained in the current model.
In SDFormat 1.7, the :: syntax for referencing across model boundaries is not supported.
With the addition of //world/frame and //world/model/pose/@relative_to,
it is necessary to consider the world scope separately from each
model's scope to avoid name conflicts and ensure encapsulation.
In SDFormat 1.8, the :: syntax for referencing across model boundaries will be
formalized and supported.
3.1.1 Alternatives considered
One alternative was to not use any scoping at all, such that any frame could be referenced by name from any other part of the world. This would make naming conflicts much more common as you could not include two copies of the same model in a world without giving unique names to the links, joints, and explicit frames.
Another approach instead of scoping is to treat the xml hierarchy like a
filesystem and use familiar operators such as / and .. to specify frame
references directly in the hierarchy.
This adds significant complexity and difficulty and deviates from the current
practice of specifying parent and child links for a joint by name.
The current proposal is the most conservative and should allow for more expansive (but possibly more complex) scoping rules to be incorporated while maintaining compatibility.
3.2 Unique names for all sibling elements
All named sibling elements must have unique names. Uniqueness is forced so that referencing implicit frames is not ambiguous, e.g. you cannot have a link and joint share an implicit frame name.
One method of ensuring name uniqueness across element types is by adopting the
practice of including the element type in model names.
For example, numbering models as link1 / link2 or using element types as a
suffix, like front_right_wheel_joint / front_right_steering_joint.
Furthermore, the frame semantics proposed in this document use the names of
sibling elements //model/frame, //model/model, //model/link and //model/joint to refer
to frames.
<sdf version="1.4">
<model name="model">
<link name="base"/>
<link name="attachment"/>
<joint name="attachment" type="fixed"> <!-- VALID, but RECOMMEND AGAINST -->
<parent>base</parent>
<child>attachment</child>
</joint>
</model>
</sdf>
<sdf version="1.7">
<model name="model">
<link name="base"/>
<link name="attachment"/>
<joint name="attachment" type="fixed"> <!-- INVALID, sibling link has same name. -->
<parent>base</parent>
<child>attachment</child>
</joint>
</model>
</sdf>
Some existing SDFormat models may not comply with this requirement. * A validation tool will need to be created to identify models that violate this requirement. * The specification version is incremented to 1.7 so that checks can be added when converting to the newer, stricter version.
SDFormat 1.5 is more permissive and does not explicitly disallow identical
sibling names.
This change is necessary because frames are referenced in several attributes by name.
It is necessary to avoid naming conflicts between frames defined in
//model/frame, //model/model, //model/link and //model/joint.
3.2.1 Alternatives considered
It was considered to specify the frame type in the //frame/@attached_to
and //pose/@relative_to attributes in order to avoid this additional naming
restriction.
For example, the following approach uses a URI with the frame type encoded
as the scheme.
<model name="model">
<link name="base"/>
<frame name="base"/>
<frame name="link_base">
<pose relative_to="link://base"/> <!-- Relative to the link. -->
<frame name="frame_base">
<pose relative_to="frame://base"/> <!-- Relative to the frame. -->
</model>
While an approach like this would avoid the need for the new naming restrictions, it would either require always specifying the frame type in addition to the frame name or add complexity to the specification by allowing multiple ways to specify the same thing. Moreover, it was mentioned above that it can be very confusing when sibling elements of any type have identical names, which mitigates the need to support non-unique names for sibling elements. As such, the naming restriction is preferred.
3.3 Reserved names
Entities in a simulation must not use world as a name. It has a special
interpretation when specified as a parent or child link of a joint.
<model name="world"/><!-- INVALID: world is a reserved name. -->
<model name="world_model"/><!-- VALID -->
<model name="model">
<link name="world"/><!-- INVALID: world is a reserved name. -->
<link name="world_link"/><!-- VALID -->
</model>
Names starting and ending with double underscores (eg. __wheel__) must be
reserved for use by library implementors and the specification. For example,
such names might be useful during parsing for setting sentinel or default names
for elements with missing names.
If explicitly stated, they can be referred to
(e.g. __model__ / world for implicit model / world frames, respectively).
<model name="__model__"/><!-- INVALID: name starts and ends with __, and is reserved. -->
<model name="model">
<!-- VALID: Both frames are equivalent. -->
<frame name="frame1"/>
<frame name="frame2" attached_to="__model__"/>
</model>
<model name="model">
<link name="__link__"/><!-- INVALID: name starts and ends with __. -->
</model>
In SDFormat 1.5, when a joint specifies “world” as its parent or child link, its behavior is inconsistent and depends on the existence of a sibling link named “world”. If such a sibling link exists, that link will be used as the parent / child, but if no sibling link exists, then a static link fixed to the world frame is used instead. These changes reduce the inconsistency by disallowing sibling links named “world”.
4 Details of //model/frame
The //model/frame must have two attributes, @name and @attached_to, as well
as a child //pose element that specifies the initial pose of the frame.
Further details of the attributes of //model/frame are given in the following subsections.
SDFormat 1.5 introduced //model/frame and its attributes,
but left the semantics undefined.
It is necessary to define these semantics so the element and attributes can be utilized.
4.1 The //model/frame/@name attribute
The //model/frame/@name attribute must specify the name of a //frame.
It is a required attribute, and can be used by other frames in the @attached_to
and //pose/@relative_to attributes to refer to this frame.
As stated in a previous section, all sibling elements must have unique names to
avoid ambiguity when referring to frames by name.
<model name="frame_naming">
<frame/> <!-- INVALID: name attribute is missing. -->
<frame name=''/> <!-- INVALID: name attribute is empty. -->
<frame name='A'/> <!-- VALID. -->
<frame name='B'/> <!-- VALID. -->
</model>
<model name="nonunique_sibling_frame_names">
<frame name='F'/>
<frame name='F'/> <!-- INVALID: sibling names are not unique. -->
</model>
<model name="nonunique_sibling_names">
<link name='L'/>
<frame name='L'/> <!-- INVALID: sibling names are not unique. -->
</model>
4.2 The //model/frame/@attached_to attribute
The //model/frame/@attached_to attribute must specify the link or nested model to which the
//frame is attached.
It is an optional attribute.
If it is specified, it must contain the name of an explicit or implicit frame
in the current scope.
If a //frame is specified, recursively following the @attached_to attributes
of the specified frames must lead to the name of a link.
Cycles in the @attached_to graph are not allowed.
If the attribute is not specified, the frame is attached to the model frame
and thus indirectly attached to the canonical link.
<model name="frame_attaching">
<link name="L"/>
<frame name="F00"/> <!-- VALID: Indirectly attached_to canonical link L via the model frame. -->
<frame name="F0" attached_to=""/> <!-- VALID: Indirectly attached_to canonical link L via the model frame. -->
<frame name="F1" attached_to="L"/> <!-- VALID: Directly attached_to link L. -->
<frame name="F2" attached_to="F1"/> <!-- VALID: Indirectly attached_to link L via frame F1. -->
<frame name="F3" attached_to="A"/> <!-- INVALID: no sibling frame named A. -->
</model>
<model name="nested_model_attaching">
<link name="L"/>
<model name="M">
<link name="L"/>
</model>
<frame name="F00"/> <!-- VALID: Indirectly attached_to canonical link L via the model frame. -->
<frame name="F0" attached_to=""/> <!-- VALID: Indirectly attached_to canonical link L via the model frame. -->
<frame name="F1" attached_to="M"/> <!-- VALID: Indirectly attached_to nested model M. -->
<frame name="F2" attached_to="F1"/> <!-- VALID: Indirectly attached_to nested model M via frame F1. -->
</model>
<model name="joint_attaching">
<link name="P"/>
<link name="C"/>
<joint name="J" type="fixed">
<parent>P</parent>
<child>C</child>
</joint>
<frame name="F1" attached_to="P"/> <!-- VALID: Directly attached_to link P. -->
<frame name="F2" attached_to="C"/> <!-- VALID: Directly attached_to link C. -->
<frame name="F3" attached_to="J"/> <!-- VALID: Indirectly attached_to link C via joint J. -->
<frame name="F4" attached_to="F3"/> <!-- VALID: Indirectly attached_to link C via frame F3. -->
</model>
<model name="frame_attaching_cycle">
<link name="L"/>
<frame name="F0" attached_to="F0"/> <!-- INVALID: cycle in attached_to graph does not lead to link. -->
<frame name="F1" attached_to="F2"/>
<frame name="F2" attached_to="F1"/> <!-- INVALID: cycle in attached_to graph does not lead to link. -->
</model>
5 Details of //world/frame
The //world/frame must have two attributes, @name and @attached_to,
and a child //pose element that specifies the initial pose of the frame.
Further details of the attributes of //world/frame are given in the following subsections.
SDFormat 1.5 introduced //world/frame and its attributes, but left the semantics undefined.
It is necessary to define these semantics so the element and attributes can be utilized.
5.1 The //world/frame/@name attribute
The //world/frame/@name attribute must specify the name of the frame.
To avoid ambiguity, sibling frames — explicit frames specified by //world/frame and
implicit frames specified by //world/model— must have unique names.
5.2 The //world/frame/@attached_to attribute
The //world/frame/@attached_to attribute must specify another frame to which
this frame is attached.
A //world/frame can be attached to an implicit frame
(defined by //world or //world/model) or to an explicit frame defined by
//world/frame.
If the //world/frame/@attached_to attribute is not
specified or is left empty, the frame will be attached to the world frame. If
the attribute is specified, it must refer to a sibling //world/frame or
//world/model.
When a //world/frame is attached to a //world/model, it is indirectly
attached to the canonical link of the model.
Similar to //model/frame, cycles in the @attached_to graph are not allowed.
If a //world/frame is specified, recursively following the @attached_to
attributes of the specified frames must lead to the implicit world frame or to
the canonical link of a sibling model.
<world name="frame_attaching">
<frame name="F0"/> <!-- VALID: Indirectly attached_to the implicit world frame. -->
<frame name="F1" attached_to=""/> <!-- VALID: Indirectly attached_to the implicit world frame. -->
<frame name="F2" attached_to="F1"/> <!-- VALID: Directly attached to F1, indirectly attached_to the implicit world frame via F1. -->
<frame name="F3" attached_to="A"/> <!-- INVALID: no sibling frame named A. -->
<model name="M0">
<link name="L"/> <!-- Canonical link. -->
</model>
<frame name="F4" attached_to="M0"/> <!-- Valid: Indirectly attached_to to the canonical link, L, of M0. -->
</world>
<world name="frame_attaching_cycle">
<frame name="F0" attached_to="F0"/> <!-- INVALID: cycle in attached_to graph does not lead to the implicit world frame. -->
<frame name="F1" attached_to="F2"/>
<frame name="F2" attached_to="F1"/> <!-- INVALID: cycle in attached_to graph does not lead to the implicit world frame. -->
</world>
6 Details of //pose/@relative_to attribute
The //pose/@relative_to attribute must indicate the frame relative to which
the initial pose of the frame is expressed.
This must be applied equally to the pose of explicit frames (//frame/pose),
implicit frames (//model/pose, //link/pose, and //joint/pose),
and objects without named frames
(//collision/pose, //light/pose, //sensor/pose, //visual/pose).
- If the
//pose/@relative_toattribute is not an empty string"", its value must match the name of an explicit or implicit frame in the current scope. - If the
//pose/@relative_toattribute does not exist or is empty, the default behavior for all elements other than//frame/poseis the behavior from SDFormat 1.4 (see the "Parent frames in sdf 1.4" section of the pose frame semantics documentation).- This corresponds to
//model/model/poseand//link/poserelative to the parent model frame by default and//joint/poserelative to the child link's implicit frame by default.
- This corresponds to
- If the
//frame/pose/@relative_toattribute does not exist or is empty, it defaults to the value of the//frame/@attached_toattribute.
Cycles in the @relative_to attribute graph are not allowed and must be
checked separately from the @attached_to attribute graph.
Following the @relative_to attributes of the specified frames in the model
scope must lead to a frame expressed relative to the model frame.
In the world scope, following the @relative_to attributes must lead to
the implicit world frame.
<model name="link_pose_relative_to">
<link name="L1">
<pose>{X_ML1}</pose> <!-- Pose relative_to model frame (M) by default. -->
</link>
<link name="L2">
<pose relative_to="">{X_ML2}</pose> <!-- Pose relative_to model frame (M) by default. -->
</link>
<link name="L3">
<pose relative_to="L1">{X_L1L3}</pose> <!-- Pose relative_to link frame (L1 -> M). -->
</link>
<link name="L4">
<pose relative_to="A">{X_AL4}</pose> <!-- INVALID: no frame in model scope named A. -->
</link>
<link name="cycle0">
<pose relative_to="cycle0">{X_C0C0}</pose> <!-- INVALID: cycle in relative_to graph does not lead to model frame. -->
</link>
<link name="C1">
<pose relative_to="C2">{X_C1C2}</pose>
</link>
<link name="C2">
<pose relative_to="C1">{X_C2C1}</pose> <!-- INVALID: cycle in relative_to graph does not lead to model frame. -->
</link>
</model>
<model name="nested_model_pose_relative_to">
<frame name="M"/> <!-- Explicit frame M coincident with implicit model frame __model__. -->
<link name="L"/>
<model name="M1">
<pose>{X_MM1}</pose> <!-- Pose relative_to implicit model frame (M) by default. -->
<link name="L"/>
</model>
<model name="M2">
<pose relative_to="">{X_MM2}</pose> <!-- Pose relative_to implicit model frame (M) by default. -->
<link name="L"/>
</model>
<model name="M3">
<pose relative_to="M1">{X_M1M3}</pose> <!-- Pose relative_to nested model frame (M1 -> M). -->
<link name="L"/>
</model>
<model name="M4">
<pose relative_to="A">{X_AM4}</pose> <!-- INVALID: no frame in model scope named A. -->
<link name="L"/>
</model>
<model name="cycle0">
<pose relative_to="cycle0">{X_C0C0}</pose> <!-- INVALID: cycle in relative_to graph does not lead to model frame. -->
<link name="L"/>
</model>
<model name="C1">
<pose relative_to="C2">{X_C1C2}</pose>
<link name="L"/>
</model>
<model name="C2">
<pose relative_to="C1">{X_C2C1}</pose> <!-- INVALID: cycle in relative_to graph does not lead to model frame. -->
<link name="L"/>
</model>
</model>
<model name="joint_pose_relative_to">
<link name="P1"/> <!-- Link pose relative to model frame (M) by default. -->
<link name="C1"/> <!-- Link pose relative to model frame (M) by default. -->
<joint name="J1" type="fixed">
<pose>{X_C1J1}</pose> <!-- Joint pose relative to child link frame (C1 -> M) by default. -->
<parent>P1</parent>
<child>C1</child>
</joint>
<link name="P2"/> <!-- Link pose relative to model frame (M) by default. -->
<joint name="J2" type="fixed">
<pose relative_to="P2">{X_P2J2}</pose> <!-- Joint pose relative to link frame P2 -> M. -->
<parent>P2</parent>
<child>C2</child>
</joint>
<link name="C2">
<pose relative_to="J2">{X_J2C2}</pose> <!-- Link pose relative to joint frame J2 -> P2 -> M. -->
</link>
<link name="P3"/>
<link name="C3">
<pose relative_to="J3">{X_J3C3}</pose>
</link>
<joint name="J3" type="fixed">
<pose relative_to="C3">{X_C3J3}</pose> <!-- INVALID: cycle in relative_to graph does not lead to model frame. -->
<parent>P3</parent>
<child>C3</child>
</joint>
</model>
<model name="frame_pose_relative_to">
<link name="L">
<pose>{X_ML}</pose> <!-- Link pose relative_to the model frame (M) by default. -->
</link>
<frame name="F0"> <!-- Frame indirectly attached_to canonical link L via model frame. -->
<pose>{X_MF0}</pose> <!-- Pose relative_to the attached_to frame (M) by default. -->
</frame>
<frame name="F1" attached_to="L"> <!-- Frame directly attached_to link L. -->
<pose>{X_LF1}</pose> <!-- Pose relative_to the attached_to frame (L -> M) by default. -->
</frame>
<frame name="F2" attached_to="L"> <!-- Frame directly attached_to link L. -->
<pose relative_to="">{X_LF2}</pose> <!-- Pose relative_to the attached_to frame (L -> M) by default. -->
</frame>
<frame name="F3"> <!-- Frame indirectly attached_to canonical link L via model frame. -->
<pose relative_to="L">{X_LF3}</pose> <!-- Pose relative_to link frame L -> M. -->
</frame>
<frame name="F4">
<pose relative_to="A">{X_AF4}</pose> <!-- INVALID: no frame in model scope named A. -->
</frame>
<frame name="cycle0">
<pose relative_to="cycle0">{X_C0C0}</pose> <!-- INVALID: cycle in relative_to graph does not lead to model frame. -->
</frame>
<frame name="C1">
<pose relative_to="C2">{X_C1C2}</pose>
</frame>
<frame name="C2">
<pose relative_to="C1">{X_C2C1}</pose> <!-- INVALID: cycle in relative_to graph does not lead to model frame. -->
</frame>
</model>
<world name="scope_relative_to"> <!-- Implicit world frame. Referred to as (W) -->
<frame name="W0"> <!-- Frame attached_to implicit world frame by default. -->
<pose>{X_WW0}</pose> <!-- Pose relative_to the attached_to frame (W) by default. -->
</frame>
<frame name="W1"> <!-- Frame attached_to implicit world frame by default. -->
<pose relative_to="W0">{X_W0W1}</pose> <!-- Pose relative_to explicit frame W0. -->
</frame>
<model name="M1">
<pose>{X_WM1}</pose> <!-- Model pose relative_to world frame by default. -->
<frame name="F"> <!-- Frame indirectly attached_to canonical link link L via model frame. -->
<pose>{X_MF}</pose> <!-- Pose relative_to the attached_to frame (M) by default. -->
</frame>
<link name="L">
<collision name="C">
<pose relative_to="F">{X_FC}</pose> <!-- Pose relative to explicit frame F (F -> M) in this model's scope. -->
</collision>
<visual name="V">
<pose relative_to="F">{X_FV}</pose> <!-- Pose relative to explicit frame F (F -> M) in this model's scope. -->
</visual>
<light name="L"> <!-- Name matches that of containing link, which is permitted. -->
<pose relative_to="F">{X_FL}</pose> <!-- Pose relative to explicit frame F (F -> M) in this model's scope. -->
</light>
</link>
<model name="N">
<pose relative_to="F">{X_FN}</pose> <!-- Pose relative relative to explicit frame F (F -> M) in model M1's scope. -->
<link name="NL"/>
</model>
<frame name="F0"> <!-- Frame indirectly attached_to canonical link L via model frame. -->
<pose relative_to="N">{X_NF0}</pose> <!-- Pose relative_to the nested model frame N (N -> F -> M). -->
</frame>
<frame name="F1" attached_to="L"> <!-- Frame directly attached_to link L. -->
<pose relative_to="C">{X_CL}</pose> <!-- INVALID: no frame named C in this scope (collisions don't have implicit frames). -->
</frame>
<frame name="F2" attached_to="L"> <!-- Frame directly attached_to link L. -->
<pose relative_to="W0">{X_W0L}</pose> <!-- INVALID: no frame named W0 in this scope (can't access world scope from within model). -->
</frame>
</model>
<frame name="W2" attached_to="M1"/> <!-- Frame indirectly attached_to canonical link L of model M1. -->
<frame name="W3"> <!-- Frame attached_to world frame by default. -->
<pose relative_to="M1">{X_M1W3}</pose> <!-- Pose relative_to implicit model frame M1. -->
</frame>
<model name="M2">
<pose relative_to="W3">{X_W3M2}</pose> <!-- Pose relative_to explicit frame W3. -->
<link name="L"/>
</model>
</world>
<world name="model_pose_relative_to">
<model name="noframe0">
<pose relative_to="noframe0">{X_N0N0}</pose> <!-- INVALID: no frame named noframe0 in this scope. -->
...
</model>
<model name="cycle0">
<pose relative_to="__model__">{X_C0C0}</pose> <!-- INVALID: cycle in relative_to graph does not lead to world frame. -->
...
</model>
</world>
<world name="world_frame_cycles">
<frame name="cycle0">
<pose relative_to="cycle0">{X_C0C0}</pose> <!-- INVALID: cycle in relative_to graph does not lead to world frame. -->
</frame>
<frame name="C1">
<pose relative_to="C2">{X_C1C2}</pose>
</frame>
<frame name="C2">
<pose relative_to="C1">{X_C2C1}</pose> <!-- INVALID: cycle in relative_to graph does not lead to world frame. -->
</frame>
</model>
The following example may look like it has a graph cycle since frame F1 is
attached_to link L2, and the pose of link L2 is relative_to frame F1.
It is not a cycle, however, since the @attached_to and @relative_to attributes
have separate, valid graphs.
<model name="not_a_cycle">
<link name="L1">
<pose>{X_ML1}</pose> <!-- Pose relative to model frame (M) by default. -->
</link>
<frame name="F1" attached_to="L2"> <!-- Frame directly attached to link L2. -->
<pose relative_to="L1">{X_L1F1}</pose> <!-- Pose relative to implicit link frame L1 -> M. -->
</frame>
<link name="L2">
<pose relative_to="F1">{X_F1L2}</pose> <!-- Pose relative to frame F1 -> L1 -> M. -->
</link>
</model>
SDFormat 1.5 added the //pose/@frame attribute, but the semantics were left undefined.
Defining the semantics of //pose/@frame, now //pose/@relative_to,
is necessary to allow the use of the attribute.
7 Replace //joint/axis/use_parent_model_frame with //joint/axis/xyz/@expressed_in
The //joint/axis/use_parent_model_frame tag must be removed in SDFormat 1.7.,
and //joint/axis/xyz/@expressed_in must be added to modify the orientation
of this vector.
An empty string or default value implies the joint's initial orientation.
Any valid frame can be referred to from here.
This also applies to //joint/axis2.
As an example, an SDFormat 1.6 joint like this:
<model name="example">
...
<joint name="joint" type="revolute">
<pose>{X_CJ}</pose>
<parent>{parent}</parent>
<child>{child}</child>
<axis>
<xyz>{xyz_axis_M}</xyz>
<use_parent_model_frame>true</use_parent_model_frame>
</axis>
</joint>
</model>
Becomes the following in SDFormat 1.7:
<model name="example">
...
<joint name="joint" type="revolute">
<pose>{X_CJ}</pose>
<parent>{parent}</parent>
<child>{child}</child>
<axis>
<xyz expressed_in="__model__">{xyz_axis_M}</xyz>
</axis>
</joint>
</model>
SDFormat 1.5 introduced this tag to maintain backwards compatibility with SDFormat 1.4 when specifying the unit vector along the axis of motion of a joint.
The removal is necessary now because it has become clear that the usefulness of
this tag is outweighed by the confusion it creates,
as the resulting frame semantics of //joint/axis/xyz are inconsistent with the
way other tags in SDFormat operate.
The addition of //joint/axis/xyz/@expressed_in accommodates the migration from
use_parent_model and improves expressiveness.
7.1 Alternatives considered
Migration for //jonit/axis/xyz is absolutely necessary if
//use_parent_model_frame is removed. SDFormat's current conversion code (in
src/Converter.cc) is only for changing the basic structure of a document, and
this change would require more involved changes.
8 Directly Nested Models
Amendment: This section has been added as part of Amendment 1.
Nested models become more important in the [Composition Proposal](/?tut=composition_proposal) because now scoped names have more meaning.
In order to simplify implementation details, both directly nested models and included nested models should generally yield the same behavior. To support this, we must support directly nested models in the DOM API.
8.1 libsdformat Support
As mentioned in the
Composition - Defining models directly inside parent models
section, libsdformat <= 9.2.x does not support directly nested models.
This proposes support for directly nested models.
8.2 Nested Canonical Links
Given that nested models (either directly or included) will have links, it should be possible to use a nested model's link as the top-level model's canonical link.
This should also enable nested models inside of a parent model without any of its own links. As an example:
<model name="top">
<model name="nested">
<link name="link"/>
</model>
</model>
If the canonical link were to be specified explicitly using :: syntax
that will be supported in SDFormat 1.8, the following model
would be equivalent to the above model:
<model name="top" canonical_link="nested::link">
<model name="nested">
<link name="link"/>
</model>
</model>
This should hold true for any level of nesting.
Alternatives Considered:
//model/@canonical_link could permit referencing
frames to keep "interface abstraction" -- e.g. changing a link's name, but adding in a frame for backwards compatibility. However, that would
invalidate the meaning of canonical_link and would complicate
implementation.
Examples
The following sections provide more in-depth examples of the major concepts proposed in the above sections. The examples highlight SDFormat 1.7’s powerful expressiveness for constructing models using relative coordinate frames.
1 The //pose/@relative_to attribute
Consider the following figure from the
specifying pose documentation.
It shows a parent link P, child link C, and joint J with joint frames
Jp and Jc on the parent and child respectively.

An SDFormat representation of this model is given below.
The pose of the parent link P is specified relative to the implicit
model frame, while the pose of the other
elements is specified relative to other named frames.
This allows poses to be defined recursively, and also allows explicitly named
frames Jp and Jc to be attached to the parent and child, respectively.
For reference, equivalent expressions of Jc are defined as Jc1 and Jc2.
<model name="M">
<link name="P">
<pose relative_to="__model__">{X_MP}</pose>
</link>
<link name="C">
<pose relative_to="P">{X_PC}</pose> <!-- Recursive pose definition. -->
</link>
<joint name="J" type="fixed">
<pose relative_to="P">{X_PJ}</pose>
<parent>P</parent>
<child>C</child>
</joint>
<frame name="Jp" attached_to="P">
<pose relative_to="J" />
</frame>
<frame name="Jc" attached_to="C">
<pose relative_to="J" />
</frame>
<frame name="Jc1" attached_to="J"> <!-- Jc1 == Jc, since J is attached to C -->
<pose relative_to="J" />
</frame>
<frame name="Jc2" attached_to="J" /> <!-- Jc2 == Jc1, since //pose/@relative_to defaults to J. -->
</model>
1.1 Parity with URDF using //pose/@relative_to
The following image from the URDF documentation corresponds to the example URDF from the "Parent frames in URDF" section of the Pose Frame Semantics: Legacy Behavior documentation (version 1.5).
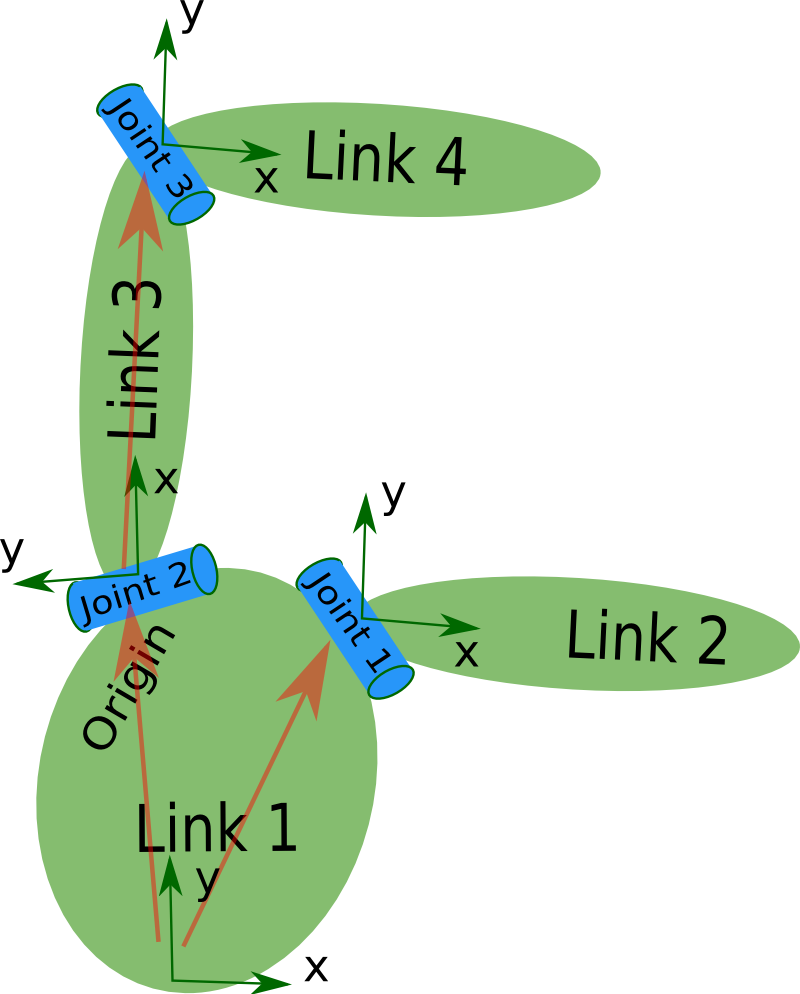
The same URDF model can be expressed with identical kinematics with SDFormat
by using link and joint names in the pose @relative_to attribute.
<model name="model">
<link name="link1"/>
<joint name="joint1" type="revolute">
<pose relative_to="link1">{xyz_L1L2} {rpy_L1L2}</pose>
<parent>link1</parent>
<child>link2</child>
</joint>
<link name="link2">
<pose relative_to="joint1" />
</link>
<joint name="joint2" type="revolute">
<pose relative_to="link1">{xyz_L1L3} {rpy_L1L3}</pose>
<parent>link1</parent>
<child>link3</child>
</joint>
<link name="link3">
<pose relative_to="joint2" />
</link>
<joint name="joint3" type="revolute">
<pose relative_to="link3">{xyz_L3L4} {rpy_L3L4}</pose>
<parent>link3</parent>
<child>link4</child>
</joint>
<link name="link4">
<pose relative_to="joint3" />
</link>
</model>
The difference between the URDF and SDFormat expressions is shown in the patch below:
--- model.urdf
+++ model.sdf
@@ -1,26 +1,32 @@
- <robot name="model">
+ <model name="model">
<link name="link1"/>
<joint name="joint1" type="revolute">
- <origin xyz='{xyz_L1L2}' rpy='{rpy_L1L2}'/>
+ <pose relative_to="link1">{xyz_L1L2} {rpy_L1L2}</pose>
- <parent link="link1"/>
+ <parent>link1</parent>
- <child link="link2"/>
+ <child>link2</child>
</joint>
- <link name="link2"/>
+ <link name="link2">
+ <pose relative_to="joint1" />
+ </link>
<joint name="joint2" type="revolute">
- <origin xyz='{xyz_L1L3}' rpy='{rpy_L1L3}'/>
+ <pose relative_to="link1">{xyz_L1L3} {rpy_L1L3}</pose>
- <parent link="link1"/>
+ <parent>link1</parent>
- <child link="link3"/>
+ <child>link3</child>
</joint>
- <link name="link3"/>
+ <link name="link3">
+ <pose relative_to="joint2" />
+ </link>
<joint name="joint3" type="revolute">
- <origin xyz='{xyz_L3L4}' rpy='{rpy_L3L4}'/>
+ <pose relative_to="link3">{xyz_L3L4} {rpy_L3L4}</pose>
- <parent link="link3"/>
+ <parent>link3</parent>
- <child link="link4"/>
+ <child>link4</child>
</joint>
- <link name="link4"/>
+ <link name="link4">
+ <pose relative_to="joint3" />
+ </link>
- </robot>
+ </model>
These semantics provide powerful expressiveness for constructing models using relative coordinate frames. This can reduce duplication of pose transform data and eliminates the need to use forward kinematics to compute the assembled poses of links.
One use case is enabling a well-formed SDFormat file to be easily converted to URDF
by directly copying xyz and rpy values and without performing any
coordinate transformations.
The well-formed SDFormat file must have kinematics with a tree structure,
pose relative_to frames specified for joints and child links, and no link poses.
A validator could be created to identify SDFormat files that can be directly
converted to URDF with minimal modifications based on these principles.
1.1.1 Alternatives considered
An even simpler approach to getting parity with URDF would be to add an
attribute //joint/@attached_to_child that specifies whether the implicit
joint frame is attached to the child link (true) or the parent link (false).
If //joint/pose/@relative_to is unset, this attribute would determine
the default value of //joint/pose/@relative_to.
For backwards compatibility, the attribute would default to true.
In this example, setting that attribute to false would eliminate the need
to specify the //joint/pose/@relative_to attribute and the duplication
of the parent link name.
As seen below, the //link/pose/@relative_to attributes still need to be set:
<model name="model">
<link name="link1"/>
<joint name="joint1" type="revolute">
<pose relative_to="link1">{xyz_L1L2} {rpy_L1L2}</pose>
<parent>link1</parent>
<child>link2</child>
</joint>
<link name="link2">
<pose relative_to="joint1" />
</link>
<joint name="joint2" type="revolute" attached_to_child="false">
<pose>{xyz_L1L3} {rpy_L1L3}</pose>
<parent>link1</parent>
<child>link3</child>
</joint>
<link name="link3">
<pose relative_to="joint2" />
</link>
<joint name="joint3" type="revolute" attached_to_child="false">
<pose>{xyz_L3L4} {rpy_L3L4}</pose>
<parent>link3</parent>
<child>link4</child>
</joint>
<link name="link4">
<pose relative_to="joint3" />
</link>
</model>
This change was not included since parity with URDF can already be achieved with the other proposed functionality.
2 Parity with URDF using //model/frame
One application of the //frame tag is to organize the model so that the pose
values are all stored in a single part of the model and referenced
by name elsewhere.
For example, the following is equivalent to the SDFormat model discussed
in the previous section.
<model name="model">
<frame name="joint1_frame" attached_to="link1">
<pose>{xyz_L1L2} {rpy_L1L2}</pose>
</frame>
<frame name="joint2_frame" attached_to="link1">
<pose>{xyz_L1L3} {rpy_L1L3}</pose>
</frame>
<frame name="joint3_frame" attached_to="link3">
<pose>{xyz_L3L4} {rpy_L3L4}</pose>
</frame>
<frame name="link2_frame" attached_to="joint1"/>
<frame name="link3_frame" attached_to="joint2"/>
<frame name="link4_frame" attached_to="joint3"/>
<link name="link1"/>
<joint name="joint1" type="revolute">
<pose relative_to="joint1_frame" />
<parent>link1</parent>
<child>link2</child>
</joint>
<link name="link2">
<pose relative_to="link2_frame" />
</link>
<joint name="joint2" type="revolute">
<pose relative_to="joint2_frame" />
<parent>link1</parent>
<child>link3</child>
</joint>
<link name="link3">
<pose relative_to="link3_frame" />
</link>
<joint name="joint3" type="revolute">
<pose relative_to="joint3_frame" />
<parent>link3</parent>
<child>link4</child>
</joint>
<link name="link4">
<pose relative_to="link4_frame" />
</link>
</model>
In this case, joint1_frame is rigidly attached to link1, joint3_frame is
rigidly attached to link3, etc.
3 Using //pose/@relative_to for co-located elements within a link
The pose information of elements attached to links is often duplicated. For example, the following link has two LED light sources, which each have co-located collision, visual, and light tags, and the pose data is duplicated within each element.
<model name="model_with_duplicated_poses">
<link name="link_with_LEDs">
<light name="led1_light" type="point">
<pose>0.1 0 0 0 0 0</pose>
</light>
<collision name="led1_collision">
<pose>0.1 0 0 0 0 0</pose>
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</collision>
<visual name="led1_visual">
<pose>0.1 0 0 0 0 0</pose>
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</visual>
<light name="led2_light" type="point">
<pose>-0.1 0 0 0 0 0</pose>
</light>
<collision name="led2_collision">
<pose>-0.1 0 0 0 0 0</pose>
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</collision>
<visual name="led2_visual">
<pose>-0.1 0 0 0 0 0</pose>
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</visual>
</link>
</model>
By creating explicit frames at the model scope, the //pose/@relative_to
attribute can be used to specify the collision, visual, and light poses
without duplication.
<model name="model_with_explicit_frames">
<frame name="led1" attached_to="link_with_LEDs">
<pose>0.1 0 0 0 0 0</pose>
</frame>
<frame name="led2" attached_to="link_with_LEDs">
<pose>-0.1 0 0 0 0 0</pose>
</frame>
<link name="link_with_LEDs">
<light name="led1_light" type="point">
<pose relative_to="led1" />
</light>
<collision name="led1_collision">
<pose relative_to="led1" />
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</collision>
<visual name="led1_visual">
<pose relative_to="led1" />
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</visual>
<light name="led2_light" type="point">
<pose relative_to="led2" />
</light>
<collision name="led2_collision">
<pose relative_to="led2" />
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</collision>
<visual name="led2_visual">
<pose relative_to="led2" />
<geometry>
<box>
<size>0.01 0.01 0.001</size>
</box>
</geometry>
</visual>
</link>
</model>
3.1 Alternatives considered
Instead of permitting elements inside a link from using the
//pose/@relative_to attribute at the model scope, one could allow
implicit frames for elements inside a link (like //link/collision,
//link/visual, etc.) and/or explicit link frames //link/frame and allow any
poses of any element to be @relative_to explicit or implicit frames
defined by sibling elements.
<model name="model_with_explicit_link_frames">
<frame name="F"/> <!-- Explicit frame F in model scope. -->
<frame name="M"/> <!-- Explicit frame F in model scope. -->
<link name="L">
<frame name="F"> <!-- Explicit frame F in link L scope. -->
<pose>{X_LF}</pose>
</frame>
<light name="led1" type="point">
<pose relative_to="F" /> <!-- Valid: Pose relative_to frame F in link scope. -->
</light>
<light name="led2" type="point">
<pose relative_to="M" /> <!-- INVALID: frame M not in link scope. -->
</light>
</link>
</model>
While there may be use cases that benefit from embedding explicit frames
inside their @attached_to link, doing so adds unnecessary complexity.
Frames would require additional scopes to be resolved, and the ability
to reference frames across links would be limited.
Furthermore, increasing the number of implicit frames increases the size
of the frame graph and adds complexity to the parsing task.
This approach is not recommended as its utility is outweighed by
its complexity.
Phases of parsing kinematics
The following sections describe the phases for parsing the kinematics of an SDFormat 1.7 model and world. Several of the phases in each section are similar to the phases of parsing in SDFormat 1.4 in the Legacy behavior documentation. In phases that differ from SDFormat 1.4, italics are used to signal the difference.
For new phases, the Title: is italicized.
Amendment: This section has been updated as part of Amendment 1. Updates relevant to Amendment 2 (SDFormat 1.8, composition) are in the [Composition Proposal](/?tut=composition_proposal).
1 Model
There are nine phases for validating the kinematics data in a model, and different parts of libsdformat handle differing sets of stages, returning an error code if errors are found during parsing:
sdf::readFileandsdf::readStringAPIs perform parsing Stage 1sdf::Root::Loadperforms most parsing stages, but skips some of the more expensive checksgz sdf --checkperforms all parsing stages, including more expensive checks
XML parsing and schema validation: Parse model file from XML into a tree data structure, ensuring that there are no XML syntax errors and that the XML data complies with the schema. Schema
.xsdfiles are generated from the.sdfspecification files when buildinglibsdformatwith the xmlschema.rb script.Name attribute checking: Check that name attributes are not an empty string
"", that they are not reserved (__.*__orworld) and that sibling elements of any type have unique names. This includes but is not limited to models, actors, links, joints, collisions, visuals, sensors, and lights. This step is distinct from validation with the schema because the schema only confirms the existence of name attributes, not their content. The code paths inlibsdformat9that implement these checks are summarized below:2.1 The
sdf::readFileandsdf::readStringAPIs check for empty names via Param::SetFromString).2.2 The
sdf::Root::LoadAPI that loads all DOM objects recursively also checks any DOM objects with name attributes for reserved names using the helper function isReservedName(const string&), returning aRESERVED_NAMEerror code if one is found (see Frame::Load for an example). Model::Load also checks for name collisions in direct children of its//modelelement using the helper function Element::HasUniqueChildNames(), though it only prints a warning to the console without generating an error code. Name uniqueness of sibling//model/link,//model/joint, and//model/frameelements is also checked when constructing the FrameAttachedTo and PoseRelativeToGraph objects in Model::Load, returning aDUPLICATE_NAMEerror code if non-unique names are detected.2.3 The
gz sdf --checkcommand loads all DOM elements and also recursively checks for name uniqueness among all sibling elements using the recursiveSiblingUniqueNames helper function.Nested model parsing: Parse each nested model according to these nine SDFormat model parsing stages.
Joint parent/child name checking: For each joint, check that the parent and child link names are different and that each match the name of a sibling link to the joint, with the following exception: if "world" is specified as a parent link name, then the joint is attached to a fixed reference frame. In
libsdformat9, these checks are all performed by the helper function checkJointParentChildLinkNames, which is invoked bygz sdf --check. A subset of these checks are performed by Joint::Load (checking that parent and child link names are different and thatworldis not specified as the child link name) and Model::Load (for non-static models calling buildFrameAttachedToGraph, which checks that each child link specified by a joint exists as a sibling of that joint).Check
//model/@canonical_linkattribute value: For models that are not static, if the//model/@canonical_linkattribute exists and is not an empty string"", check that the value of thecanonical_linkattribute matches the name of a link in this model. Inlibsdformat9, this check is performed by buildFrameAttachedToGraph, which is called by Model::Load for non-static models.Check
//model/frame/@attached_toattribute values: For each//model/frame, if theattached_toattribute exists and is not an empty string""or__model__, check that the value of theattached_toattribute matches the name of a sibling link, nested model, joint, or frame. The//frame/@attached_tovalue must not match//frame/@name, as this would cause a graph cycle. Inlibsdformat9, these checks are performed by buildFrameAttachedToGraph, which is called by Model::Load for non-static models.Check
//model/frame/@attached_tograph: For models that are not static, construct anattached_todirected graph with each vertex representing a frame (see buildFrameAttachedToGraph inlibsdformat9):7.1 Add a vertex for the frame of each
//link,//joint,//frame, and nested//modelin the model (see FrameSemantics.cc:219-233, FrameSemantics.cc:271-286, and ...).7.2 Identify the canonical link of the model:
7.2.1 Return an error if the model does not contain any links or nested models.
7.2.2 If
//model/@canonical_linkexists and is not empty, choose the link in this model named by this attribute that was confirmed to exist in step 5.7.2.3 Otherwise (i.e. if the
//model/@canonical_linkattribute does not exist or is an empty string""), if the model contains links, choose the first link.7.2.4 Otherwise (i.e. if the
//model/@canonical_linkattribute does not exist or is an empty string""and the model contains no links), get the canonical link of the first nested model. This can be a recursive process if there are multiple levels of nested models that contain no links.7.3 Add a vertex for the implicit
__model__frame. If the model is not static, add an edge connecting this vertex to the vertex of the model's canonical link (see FrameSemantics.cc:173-178 and FrameSemantics.cc:235-239)7.4 For each
//model/joint, add an edge connecting from the joint to the vertex of its child link (see FrameSemantics.cc:242-269.7.5 For each
//model/frame:7.5.1 If
//model/frame/@attached_toexists and is not empty, add an edge from this frame's vertex to the vertex named in the//model/frame/@attached_toattribute (see FrameSemantics.cc:288-322).7.5.2 Otherwise (i.e. if the
//model/frame/@attached_toattribute does not exist or is an empty string""), add an edge from this frame's vertex to the model frame vertex, (see FrameSemantics.cc:288-322).7.6 Verify that the graph has no cycles and that by following the directed edges, every vertex is connected to a link or nested model (see validateFrameAttachedToGraph and resolveFrameAttachedToBody which are called by Model::Load). To identify the link or nested model to which each frame is attached, start from the vertex for that frame, and follow the directed edges until a link or model not named
__model__is reached (see Frame::ResolveAttachedToBody and resolveFrameAttachedToBody in FrameSemantics.cc inlibsdformat9).Check
//pose/@relative_toattribute values: For each//posethat does not correspond to the__model__frame (e.g. nested//model/model/pose,//link/pose,//joint/pose,//frame/pose,//collision/pose,//light/pose, etc.), if therelative_toattribute exists and is not an empty string""or__model__, check that the value of therelative_toattribute matches the name of a link, nested model, joint, or frame in this model's scope. Inlibsdformat9, these checks are performed by buildPoseRelativeToGraph, which is called by Model::Load.Check
//pose/@relative_tograph: Construct arelative_todirected graph for the model with each vertex representing a frame (see buildPoseRelativeToGraph inlibsdformat9):9.1 Add a vertex for the implicit model frame
__model__(see FrameSemantics.cc:453-458).9.2 Add vertices for each
//model/link, nested//model/model,//model/joint, and//model/frame(see FrameSemantics.cc:460-474, FrameSemantics.cc:483-497, and FrameSemantics.cc:516-531).9.3 For each
//model/linkand nested//model/model:9.3.1 If
//pose/@relative_toexists and is not empty, add an edge from the link / nested model vertex to the vertex named in//pose/@relative_to(see FrameSemantics.cc:554-575).9.3.2 Otherwise (i.e. if
//poseor//pose/@relative_todo not exist or//pose/@relative_tois an empty string"") add an edge from the link / nested model vertex to the implicit model frame vertex (see FrameSemantics.cc:476-480).9.4 For each
//model/joint:9.4.1 If
//joint/pose/@relative_toexists and is not empty, add an edge from the joint vertex to the vertex named in//joint/pose/@relative_to(see FrameSemantics.cc:589-610).9.4.2 Otherwise (i.e. if
//joint/poseor//joint/pose/@relative_todo not exist or//joint/pose/@relative_tois an empty string"") add an edge from the joint vertex to the child link vertex named in//joint/child(see FrameSemantics.cc:499-513).9.5 For each
//model/frame:9.5.1 If
//frame/pose/@relative_toexists and is not empty, add an edge from the frame vertex to the vertex named in//frame/pose/@relative_to(see FrameSemantics.cc:629 and FrameSemantics.cc:650-659).9.5.2 Otherwise if
//frame/@attached_toexists and is not empty (i.e. if//frame/@attached_toexists and is not an empty string""and one of the following is true://frame/posedoes not exist,//frame/pose/@relative_todoes not exist, or//frame/pose/@relative_tois an empty string"") add an edge from the frame vertex to the vertex named in//frame/@attached_to(see FrameSemantics.cc:635 and FrameSemantics.cc:650-659).9.5.3 Otherwise (i.e. if neither
//frame/@attached_tonor//frame/pose/@relative_toare specified) add an edge from the frame vertex to the implicit model frame vertex (see FrameSemantics.cc:533-537).9.6 Verify that the graph has no cycles and that by following the directed edges, every vertex is connected to the implicit model frame (see validatePoseRelativeToGraph which is called by Model::Load). Other poses in the model such as
//collision/poseand//light/posedo not need to be checked for cycles since they do not create implicitly named frames. To find the pose of a DOM object relative-to a named frame in thePoseRelativeToGraph, use the DOM object'sSemanticPosefunction (such as Link::SemanticPose) and the SemanticPose::Resolve function.
2 World
This section describes phases for parsing the kinematics of an SDFormat 1.7 world. Several of these phases are similar to the phases of parsing an SDFormat 1.4 world in the Legacy behavior documentation. In phases that differ from that document, italics are used to signal the difference. For new phases, the Title: is italicized.
There are seven phases for validating the kinematics data in a world:
XML parsing and schema validation: Parse world file from XML into a tree data structure, ensuring that there are no XML syntax errors and that the XML data complies with the schema. Schema
.xsdfiles are generated from the.sdfspecification files when buildinglibsdformatwith the xmlschema.rb script.Name attribute checking: Check that name attributes are not an empty string
"", that they are not reserved (__.*__orworld) and that sibling elements of any type have unique names. This check can be limited to//world/model/@nameand//world/frame/@namesince other names will be checked in the following step. This step is distinct from validation with the schema because the schema only confirms the existence of name attributes, not their content. The code paths inlibsdformat9that implement these checks are summarized below:2.1 The
sdf::readFileandsdf::readStringAPIs check for empty names via Param::SetFromString).2.2 The
sdf::Root::LoadAPI that loads all DOM objects recursively also checks any DOM objects with name attributes for reserved names using the helper function isReservedName(const string&), returning aRESERVED_NAMEerror code if one is found (see Frame::Load for an example). World::Load also checks for name collisions in direct children of its//worldelement using the helper function Element::HasUniqueChildNames(), though it only prints a warning to the console without generating an error code. Name uniqueness of sibling//world/modeland//world/frameelements is also checked when constructing the FrameAttachedTo and PoseRelativeToGraph objects in World::Load, returning aDUPLICATE_NAMEerror code if non-unique names are detected.2.3 The
gz sdf --checkcommand loads all DOM elements and also recursively checks for name uniqueness among all sibling elements using the recursiveSiblingUniqueNames helper function.Model checking: Check each model according to the eight phases of parsing kinematics of an sdf model.
Check
//world/frame/@attached_toattribute values: For each//world/frame, if theattached_toattribute exists and is not an empty string""orworld, check that the value of theattached_toattribute matches the name of a sibling model or frame. The//frame/@attached_tovalue must not match//frame/@name, as this would cause a graph cycle. Inlibsdformat9, these checks are performed by buildFrameAttachedToGraph, which is called by World::Load.Check
//world/frame/@attached_tograph: Construct anattached_todirected graph for the world with each vertex representing a frame (see buildFrameAttachedToGraph inlibsdformat9):5.1 Add a vertex for the implicit world frame
world(see FrameSemantics.cc:333-338).5.2 Add a vertex for each model in the world. (see FrameSemantics.cc:333-338).
5.3 For each
//world/frame:5.3.1 Add a vertex to the graph (see FrameSemantics.cc:333-338).
5.3.2 If
//world/frame/@attached_toexists and is not empty, add an edge from the added vertex to the vertex named in the//world/frame/@attached_toattribute (see FrameSemantics.cc:393-394 and FrameSemantics.cc:416-428).5.3.3 Otherwise (i.e. if the
//world/frame/@attached_toattribute does not exist or is an empty string""), add an edge from the added vertex to the implicit world frame vertex (see FrameSemantics.cc:395-406 and FrameSemantics.cc:416-428).5.4 Verify that the graph has no cycles and that by following the directed edges, every vertex is connected to a model or the implicit world frame (see validateFrameAttachedToGraph which is called by World::Load). If the directed edges lead from a vertex to the implicit world frame, then the
//world/framecorresponding to that vertex is a fixed inertial frame. If the directed edges lead to a model, then the//world/framecorresponding to that vertex is attached to the implicit model frame of that model. To identify the model or fixed frame to which each frame is attached, start from the vertex for that frame, and follow the directed edges until a link is reached (see Frame::ResolveAttachedToBody and resolveFrameAttachedToBody in FrameSemantics.cc inlibsdformat9).Check
//pose/@relative_toattribute values: For each//model/poseand//world/frame/pose, if therelative_toattribute exists and is not an empty string""orworld, check that the value of therelative_toattribute matches the name of a model or frame that is a sibling of the element that contains the//pose. Inlibsdformat9, these checks are performed by buildPoseRelativeToGraph, which is called by World::Load.Check
//pose/@relative_tograph: Construct arelative_todirected graph for the model with each vertex representing a frame (see buildPoseRelativeToGraph inlibsdformat9):7.1 Add a vertex for the implicit world frame. (see FrameSemantics.cc:684-689).
7.2 Add vertices for each
//world/modeland//world/frame(see FrameSemantics.cc:691-705 and FrameSemantics.cc:714-729).7.3 For each
//world/model:7.3.1 If
//world/model/pose/@relative_toexists and is not empty, add an edge from the model vertex to the vertex named in//world/model/pose/@relative_to(see FrameSemantics.cc:746-773).7.3.2 Otherwise (i.e. if
//world/model/poseor//world/model/pose/@relative_todo not exist or//world/model/pose/@relative_tois an empty string"") add an edge from the model vertex to the implicit world frame vertex (see FrameSemantics.cc:707-711).7.4 For each
//world/frame:7.4.1 If
//frame/pose/@relative_toexists and is not empty, add an edge from the frame vertex to the vertex named in//frame/pose/@relative_to(see FrameSemantics.cc:792-822).7.4.2 Otherwise if
//frame/@attached_toexists and is not empty (i.e. if//frame/@attached_toexists and is not an empty string""and one of the following is true://frame/posedoes not exist,//frame/pose/@relative_todoes not exist, or//frame/pose/@relative_tois an empty string"") add an edge from the frame vertex to the vertex named in//frame/@attached_to(see FrameSemantics.cc:798-822).7.4.3 Otherwise (i.e. if neither
//frame/@attached_tonor//frame/pose/@relative_toare specified) add an edge from the frame vertex to the implicit world frame vertex (see FrameSemantics.cc:731-735).7.5 Verify that the graph has no cycles and that by following the directed edges, every vertex is connected to the implicit world frame (see validatePoseRelativeToGraph which is called by World::Load). Other poses in the world such as
//world/light/posedo not need to be checked for cycles since they do not create implicitly named frames. To find the pose of a DOM object relative-to a named frame in thePoseRelativeToGraph, use the DOM object'sSemanticPosefunction (such as Frame::SemanticPose) and the SemanticPose::Resolve function.
Addendums
Model Building, Contrast "Model-Absolute" vs "Element-Relative" Coordinates
X(0) implies zero configuration, while X(q) implies a value at a given
configuration.
The following are two contrasting interpretations of specifying a parent link
P and child link C, connected by joint J at Jp and Jc, respectively,
with configuration-dependent transform X_JpJc(q), with X_JpJc(0) = I.
- "Model-Absolute" Coordinates:
- Add
Pat initial poseX_MP(0),Cat initial poseX_MC(0) - Add
JatX_MJ(0), connect:PatX_PJp(X_PM(0) * X_MJ(0))CatX_CJc(X_CM(0) * X_MJ(0))
- Add
- "Element-Relative" Coordinates:
- Add
PandC; their poses are ignored unless they have a meaningful parent (e.g. a weld or other joint) - Add
J, connect:PatX_PJpCatX_CJc
X_MP(q)is driven by parent relationshipsX_MC(q)is driven byX_MP(q) * X_PJp * X_JpJc(q) * X_JcC.
- Add